图论算法之最短路算法
前言
常见的最短路算法有这些:Floyd、Dijkstra、Bellman-Ford
和 SPFA。其中,SPFA 已经死了,因为它很容易被
hack(洛谷出的测试数据生成器 CYaRon
还有专门的卡 SPFA 函数),且时间复杂度与
Bellman-Ford 几乎没有区别,所以在此不再介绍。
这些算法有哪些区别
有这么多最短路的算法,那他们究竟有什么区别呢?评判这些算法,我们有如下指标:
- 单源 or 全源
- 是否能处理负权边
- 是否能发现负权回路
- 时间复杂度
其中,单源的意思是:从一个点到其他点;全源的意思是:从任意点到任意点。其他的指标都很好理解,就不再赘述。
我将这几个指标汇总成一个表,来更加清晰地发现他们的区别:
| 单源 / 全源 | 负权边 | 负权回路 | 时间复杂度 | |
|---|---|---|---|---|
| \(Floyd\) | 全源 | 是 | 否 | \(O(N^3)\) |
| \(Dijkstra\) | 单源 | 否 | 否 | \(O(N^2)\) |
| \(Bellman\mbox{-}Ford\) | 单源 | 是 | 是 | \(O(NE)\) |
其中,\(N\) 代表结点个数,\(E\) 代表边的个数。
三个算法各有优缺点,在实战中使用最多的是 \(Dijkstra\)。
下面开始讲解这些算法。
Floyd
这个算法是最简单的最短路径算法。可以计算任意两条边之间的最短路径。
该算法的思想很简单,类似于一个区间 DP。如果点 \(i\) 到点 \(k\) 的权值加上点 \(k\) 到点 \(j\) 的权值之和小于原先点 \(i\) 到点 \(j\) 的权值,那么更新它。例如:
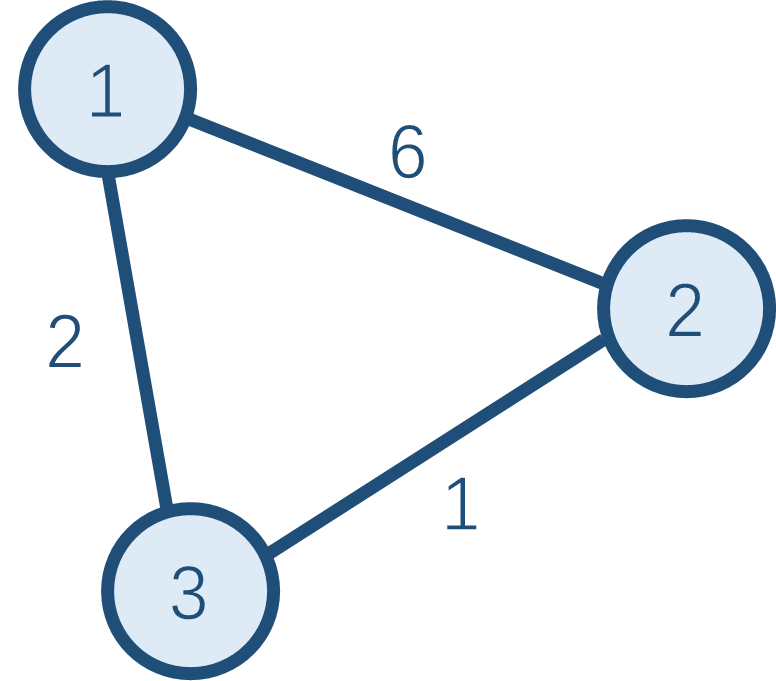
像这个图,原本点 \(1\) 到点 \(2\) 的权值为 \(6\),现在发现点 \(1\) 到点 \(3\) 的权值加上点 \(3\) 到点 \(2\) 的权值之和(\(3\))小于它,所以更新最小值。
PS: dis[u][v] 表示从 \(u\) 到 \(v\) 最短路径长度,w[u][v]
表示连接 \(u, v\) 的边的权值。
1 | /********** 初始化 **********/ |
值得注意的是,虽然第一层循环也可以放在 \(i, j\) 后面或者 \(i, j\) 之间,但是这会导致效率降低,甚至比 \(O(N^3)\) 还要低,所以枚举中间点的这层循环必须放在最外层。
示例代码:
1 |
|
Dijkstra
这个算法是最常用的最短路径算法。速度也是三个算法中最快的。
该算法用的是贪心的思路,思想是蓝白点。什么是蓝点、白点呢?
白点是已经确定最短路径的点,而蓝点就是未确定最短路径的点。想要求出两点之间的最短路,就是要将一个点作为起点,另一个点变成白点。
本节中,dis[i] 代表从指定起点开始,到点 \(i\) 的最短路。
贪心的思路是:每次选最小的 dis[i],将 \(i\) 变为白点,并更新与 \(i\) 相邻的所有蓝点到起点的最短路
dis[j]。重复这项操作即可。可以看出,这个算法会认为在同一条路径上,经过的边越多,走的距离越远。这也是为什么
\(Dijkstra\) 不能处理负权边的情况。
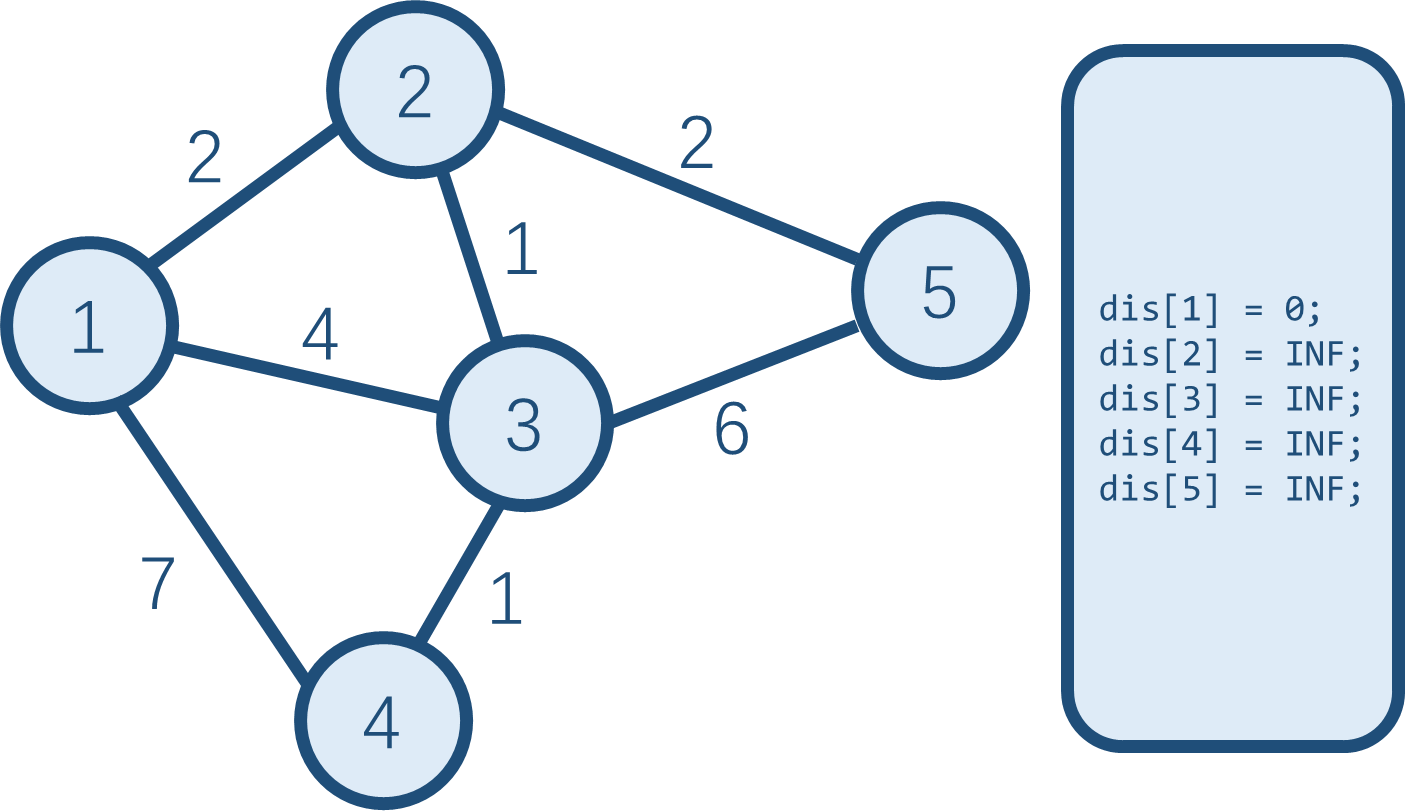
为了更好的理解,我会通过图示来解释。
为了看的更清晰,我将白点统一画成红点。
这是初始的图。我们要计算从起点 \(1\) 开始,到各个点的最短路。开始时,起点到起点的最短路为 \(0\)。
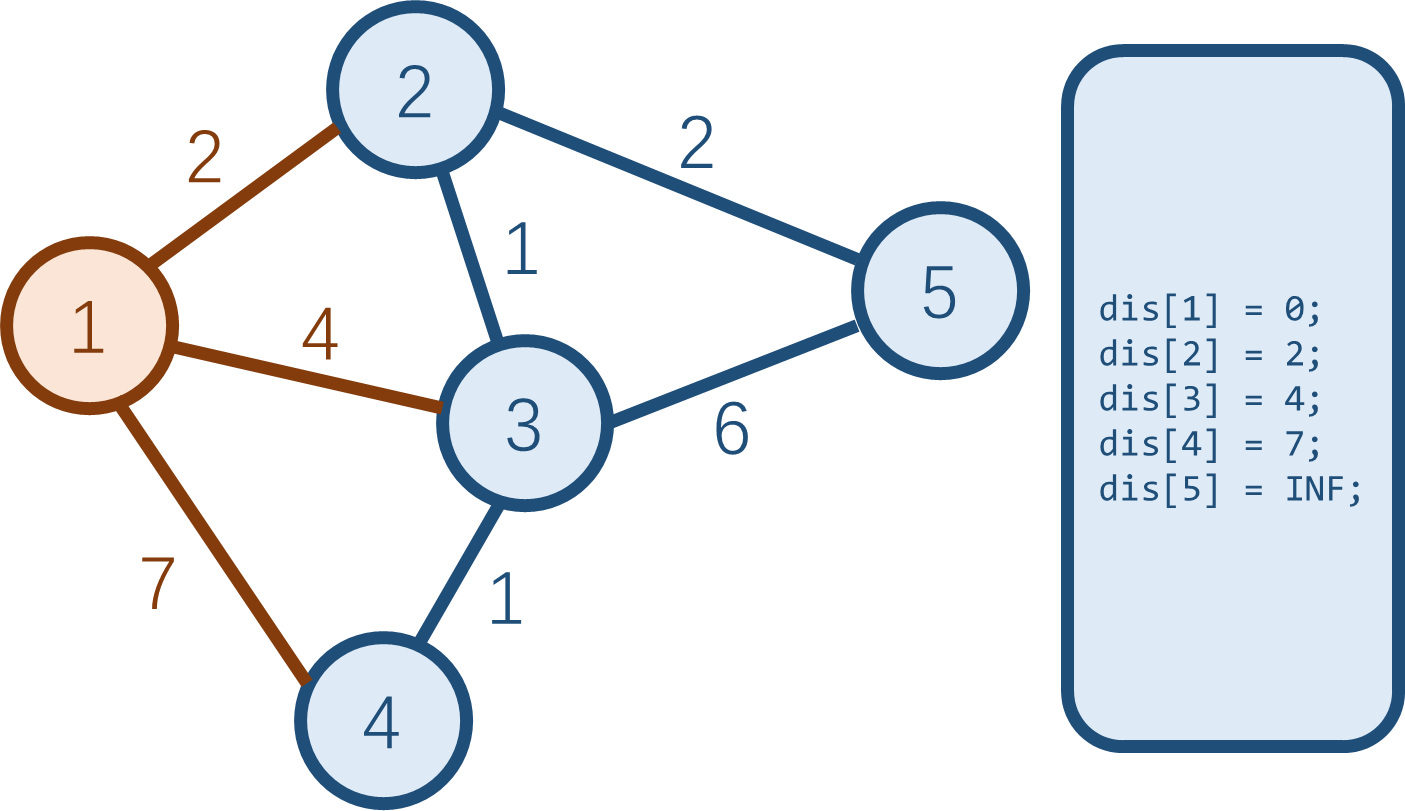
所有蓝点中,dis 值最小的是 \(1\)
号点,把它变为白点后,更新与之相邻的三个蓝点到起点的最短路
dis[2], dis[3], dis[4]。
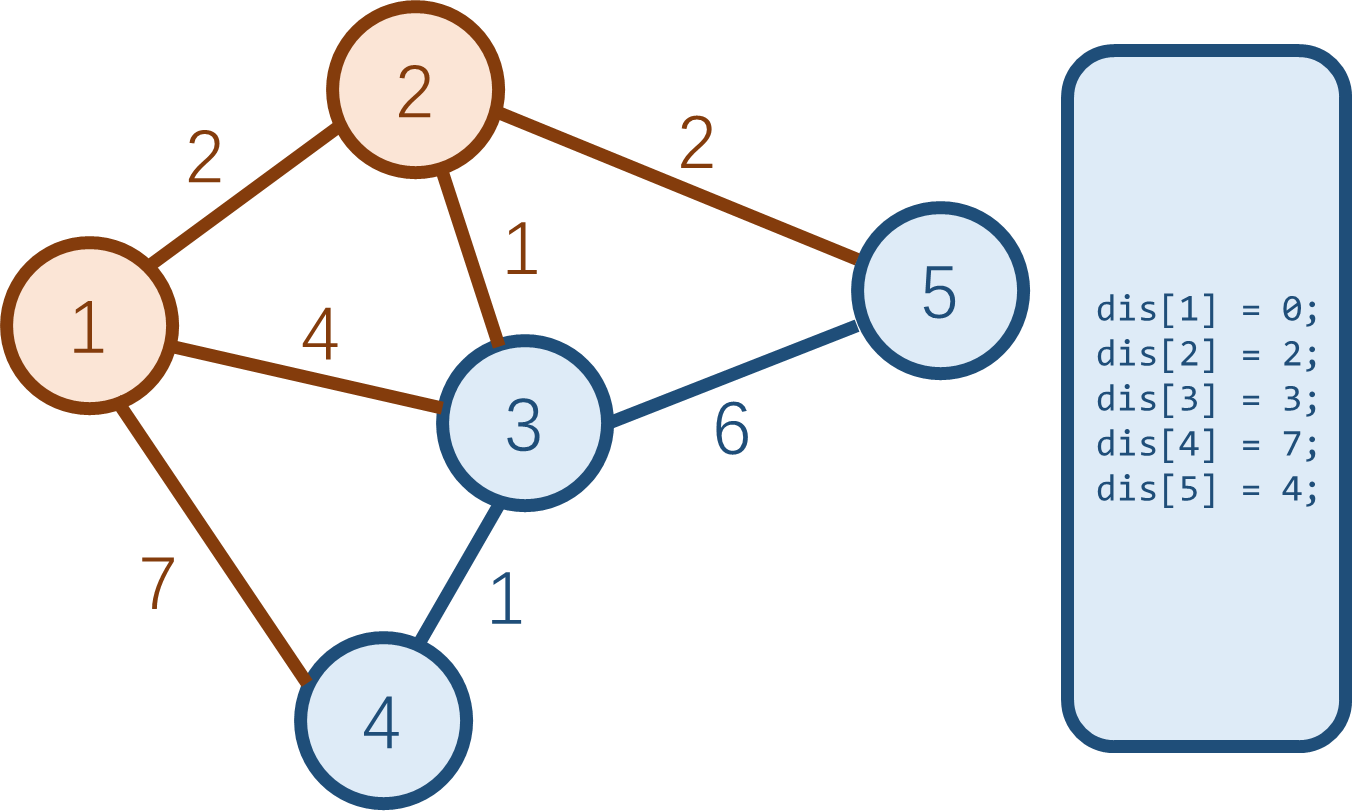
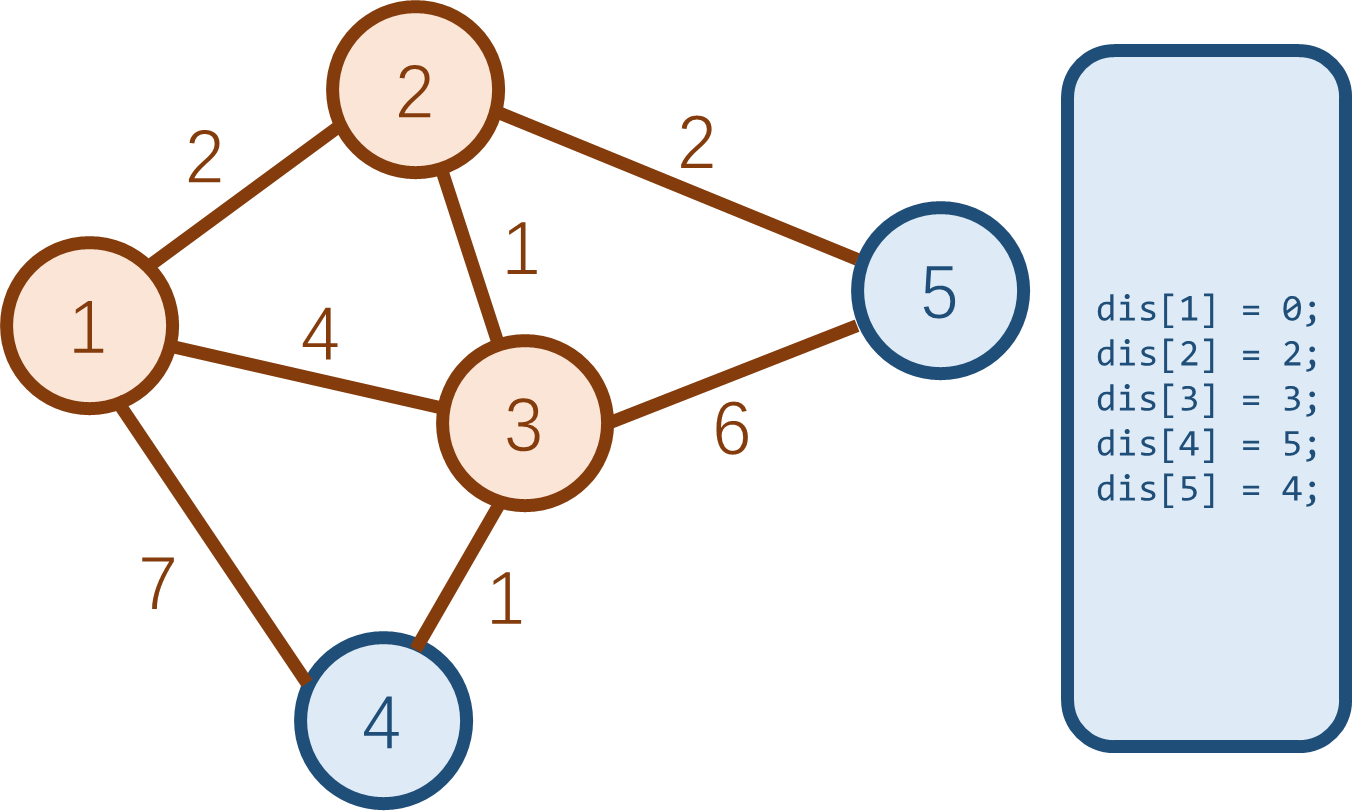
现在,点 \(2\) 是所有蓝点中
dis
值最小的蓝点。所以将其变为白点,并更新与之相邻的两个蓝点的最短路。
现在,点 \(3\) 是所有蓝点中
dis
值最小的蓝点。所以将其变为白点,并更新与之相邻的两个蓝点的最短路。
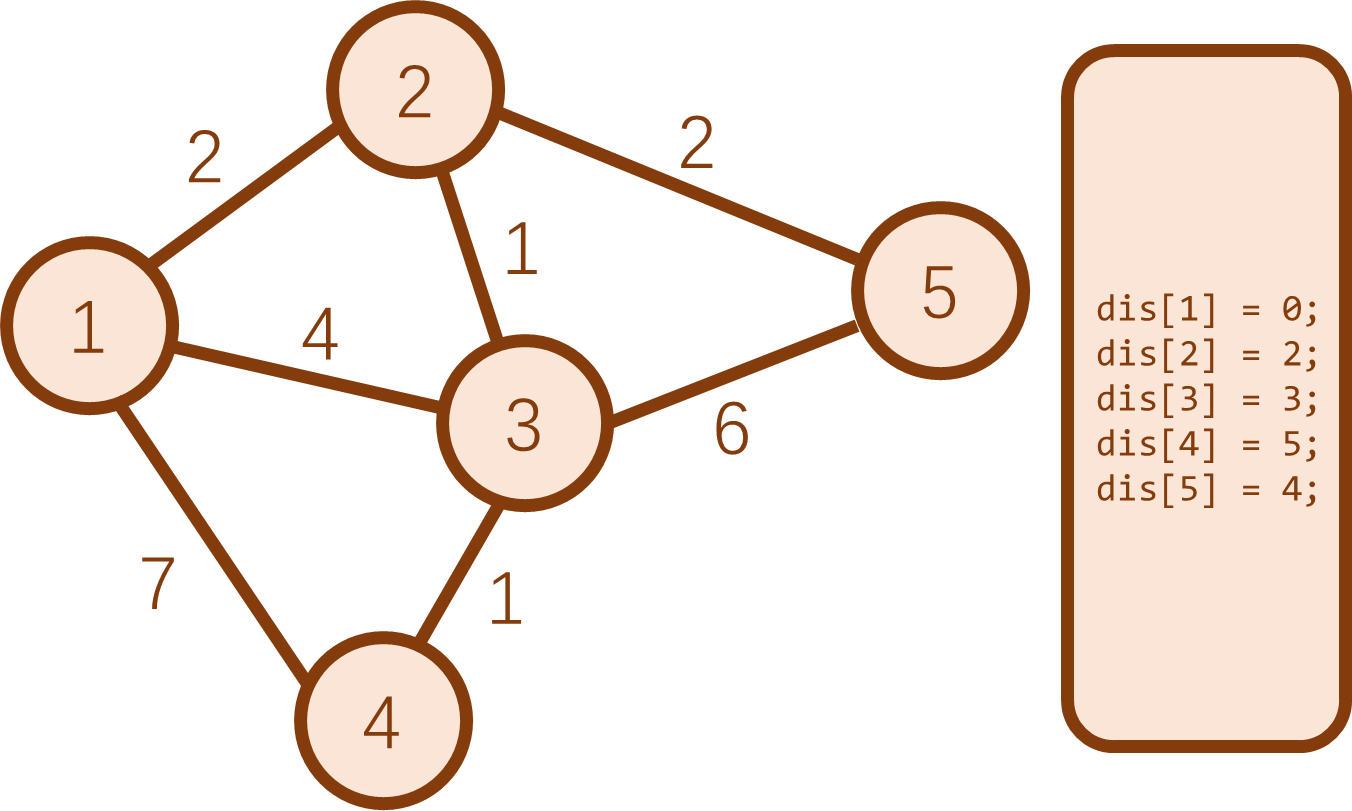
最后,依次将点 \(5\)、点 \(4\) 变为白点。至此,\(Dijkstra\) 算法过程结束。
下面举一个负权边的例子,以证明该算法无法处理负权边。
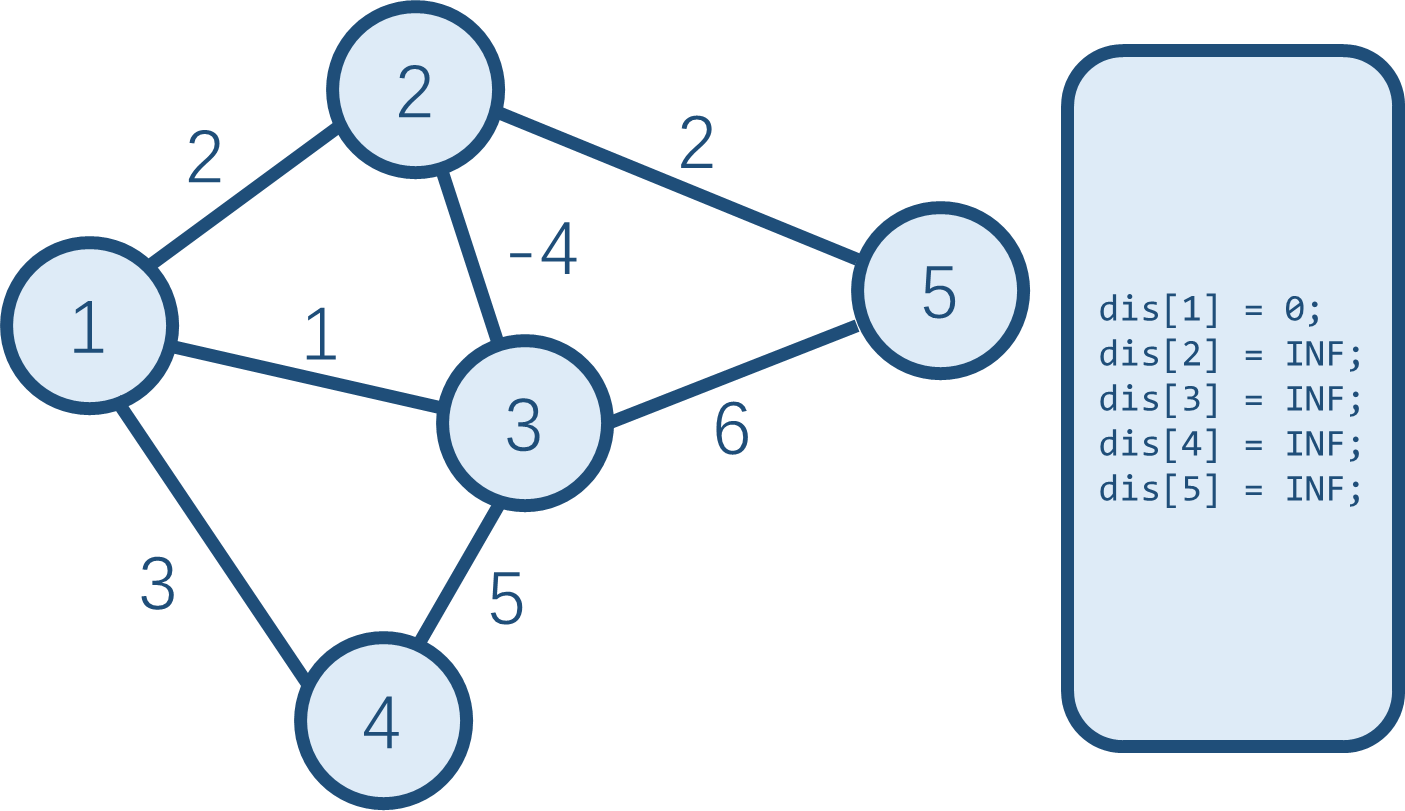
第一步同上,不再说了。
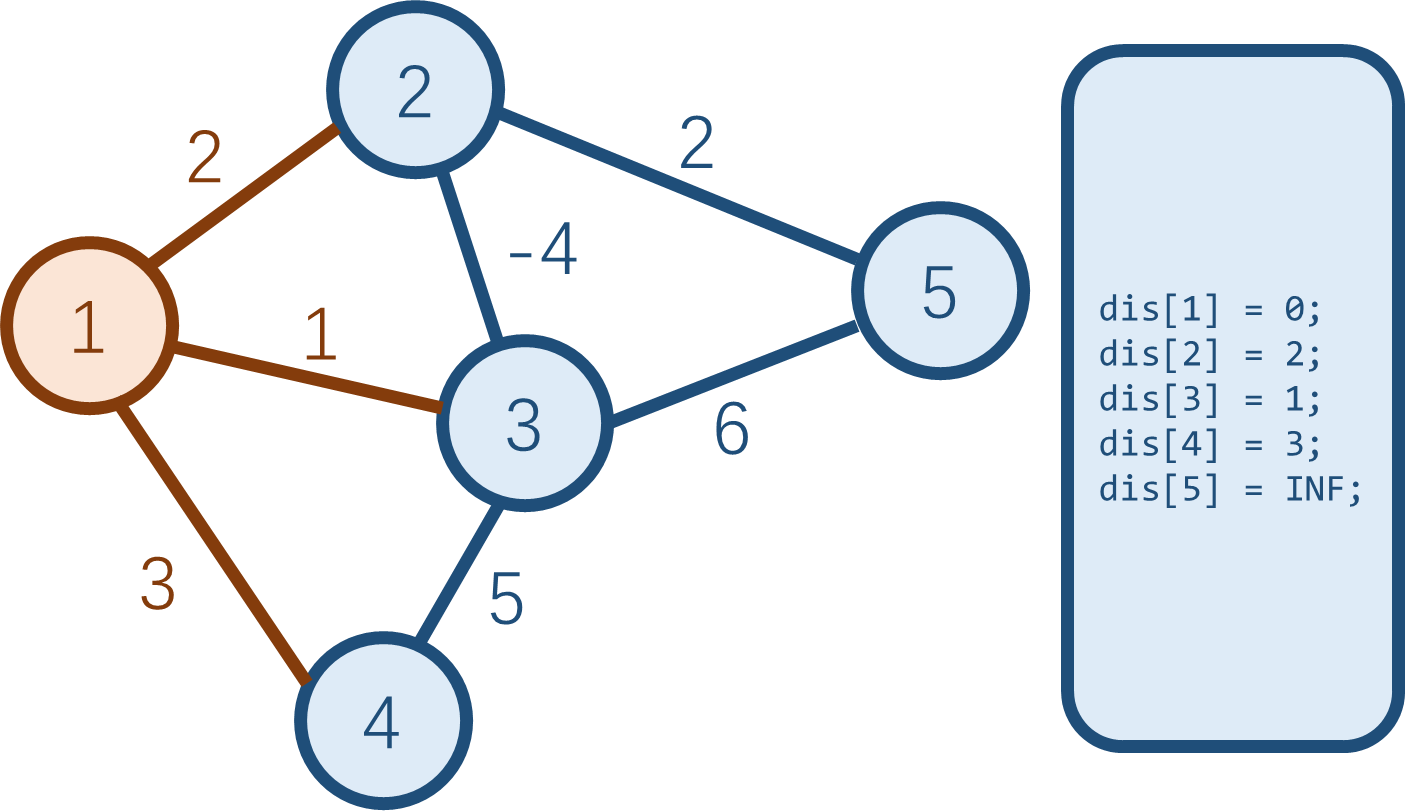
这时候,dis 值最小的蓝点是点 \(3\)。按照 \(Dijkstra\) 的思路,下一步会把点 \(3\) 设为不再改动的白点。可是,真正的到点
\(3\) 的最短路是 \(1\rightarrow 2\rightarrow 3 =
-2\)。可以看出,\(Dijkstra\)
确实不能处理负边权的情况。
代码(题目链接)
1 |
|
这个代码可以得 \(0\) 分(\(TLE\)),所以我们再来讨论一下优化。
可以发现,\(Dijkstra\) 代码中的第二层循环的第一个循环的作用就是找最小值。我们有专门的数据结构来处理——堆。堆,即优先级队列,最大的功能就是可以维护一个数列中的最大值或者最小值。所以,我们可以用堆优化 \(Dijkstra\)。
堆优化后的 \(Dijkstra\) 板子:
1 |
|
Bellman-Ford
与 \(Dijkstra\) 相同,这个算法也是采用了蓝白点的思想,也是一种单源最短路的算法。但不同的是:
它的思路是动态规划
它可以处理负边权
它可以发现负权回路
\(Bellman\mbox{-}Ford\) 算法的思路很简单。一开始,认为起点是白点,然后枚举所有的边,一定会有一些边连接着蓝点和白点。所以,每次拿现有的白点去更新所有邻接的蓝点,每次循环至少有一个点会从蓝点变成白点。
但 \(Bellman\mbox{-}Ford\) 的蓝白点与 \(Dijkstra\) 的蓝白点不太一样。\(Bellman\mbox{-}Ford\) 是用已更新过的点去更新未更新过的点。已更新过的点被称为白点。不同于 \(Dijkstra\),\(Bellman\mbox{-}Ford\) 的白点可能还会被更新。
状态定义:\(f_{k,i}\) 代表从起点出发,最多经过不构成负权回路 \(k\) 条边后到达点 \(i\) 的最短路径长度
状态转移:显然,\(f_{k,i}\) 的值是由 \(f_{k-1,j}(j\in [0,i-1])\) 的值更新而来的。即将 \(f_{k-1,j}(j\in [0,i-1])\) 的终点作为中转点,将这个点连一条边指向 \(i\),取两者最小值,即为所要求的最短路径长度。
状态转移方程:\(f_{k,u} = min(f_{k-1,u},min\{f_{k-1,j}+g_{j,u}\})\)。其中,\(g_{j,u}\) 表示点 \(i\) 到点 \(j\) 的距离。
状态初始化:为了方便书写,我们规定,点 \(0\) 为起点。则根据状态定义,\(f_{k,0}\) 代表从起点出发,最多经过 \(k\) 条边到达点 \(0\) 的最短路径长度。显然,从起点到起点的最短路径长度一定是 \(0\),所以只需要把 \(f_{k,0}\) 初始化成 \(0\),其余初始化成无穷大即可。
那么它是怎么判断负权回路的呢?
如果 \(Bellman\mbox{-}Ford\) 两层循环处理完毕后,发现还存在某条边,使得 \(f_u + w_{u,v} < f_v\),就说明一定存在负权回路。
以下面这张图为例,我们用表格的形式模拟一遍 \(Bellman\mbox{-}Ford\)。
优化:写完后我们发现,每一次只是按行更新一遍 dis
数组,所以我们可以使用滚动数组的方式来存,这样就可以省去一维。
最终代码(题目链接:AcWing 853. 有边数限制的最短路)
1 |
|
后记
这篇博客从七月末开始写,到现在九月初才写完。再加上文章篇幅比较长,难免会犯一些错误。如果大家发现了文章的错误,或者认为笔者还有哪里没有介绍清楚,请在 勘误区 中不吝指出,谢谢!